![]()
QQ机器人保姆级平民搭建方法(新)
本文内容及部分所用图片来自上一篇教程,与文章内容可能有偏差但不影响部署
如果在阅读时发现了我的错误 烦请在评论区提出
本人技术不佳 还希望来访大佬指教
写在前面
nb2a16文章原址基于Nonebot2和go-cqhttp的机器人搭建 | 稚昂长 (yzyyz.top)
概述
本文将叙述如何在linux(deepin)下使用Nonebot2(下称nb)和go-cqhttp(下称gocq)创建QQ机器人 ,若你想使用nb和gocq创建机器人,你需要:
,若你想使用nb和gocq创建机器人,你需要:
- Python环境(3.7.3以上)
- Python能力
- 读文档能力
- Linux能力(部署于linux)
- …
windows下部署也是一样的,
准备
什么是nb?什么是gocq?
关于这部分内容,你可以从他们的官网找到:
nb文档: https://v2.nonebot.dev
gocq文档: https://docs.go-cqhttp.org/
你需要记住他们,因为你需要随时查阅文档
简单粗暴来说,gocq就是一个QQ,即你需要用它来登录,接收消息,发送消息;而nb则用来实现机器人的各种功能。
如下是他们的项目地址,记得去点个star哦~
nb:https://github.com/nonebot/nonebot2
gocq:https://github.com/Mrs4s/go-cqhttp
创作本文时,nb最新版本为2.0.0b1,gocq最新版本为`v1.0.0-beta8-fix2,请注意内容时效!
开始
安装nb
安装脚手架
通过脚手架安装(官方推荐):1
pip install nb-cli
安装脚手架时会自动安装nb
安装时出现错误:
- python版本不对
- 缺少Microsoft Visual C++ 环境
- …(请仔细看报错)
安装适配器(使用脚手架安装时已经安装)
1
pip install nonebot-adapter-onebot
安装gocq
deepin
我们打开工作路径(这里我新建一个bot文件夹,bot下新建cq文件夹并打开
前往 Release下载最新版,注意与你的操作系统匹配
我这里下载 go-cqhttp_1.0.0-beta8-fix2_linux_amd64.deb, 并安装。
- 在
cq目录下执行go-cqhttp - 选择
反向WebSocket回车 - 此时目录下会生成配置文件
config.yml - 对其进行配置:
- QQ号及密码
- 反向ws地址
使用任何适宜的编辑器对配置文件进行编辑,在行4、5填写要用来做机器人的QQ账号与密码。行96 内容进行修改:
universal: ws://your_websocket_universal.server
修改为
universal: ws://127.0.0.1:8080/onebot/v11/ws
8080是端口号,根据实际需求填写,修改完保存即可,再次执行./go-cqhttp,即可登录成功(有的账号需要扫码登录,根据提示即可)

如图代表登陆成功,下方黄色提示暂且放下不管。
其他Linux发行版
下载对应release后:
- 使用
tar -xzvf [文件名]解压 cd设置工作目录为解压后的文件夹- 再执行
./go-cqhttp - 按照提示配置
config.yml与上方配置相同
创建nb项目
返回bot,在此处打开终端并运行:
1 | nb create |
此时按照如下步骤创建项目
- 输入
项目名称我这里输入了robot - 使用
↓选择src文件夹 - 选择一款预置插件,我按下空格选择echo,回车
- 按下空格键选择
noebot v11回车
(很多人这里不注意空格)
请使用任何适宜的软件(如记事本(不推荐))打开env.dev并做出修改,保证你在前面的步骤中对gocq配置的端口与此文件中的端口保持一致
PORT=8080
修改为
PORT=你使用的端口
那么现在在robot下打开终端,输入以下命令运行nonebot2:
1 | nb run |
此外,在pycharm中运行bot.py也是可行的
注意,需要让gocq和nb都运行,linux可使用进程守护一类的工具让他们后台运行,我个人是宝塔面板中的进程守护来解决这个问题

如图表示运行成功,你会发现gocq中的黄色提示变成了:
已连接到反向Web…..
也就是说,nb与gocq之间可以通信了
大功告成
现在,向你的机器人发送 /echo 123 看看会发生什么吧,不出意外地,你的机器人向你回复了123

nonebot2机器人的配置
.env.*的配置
.env.*文件为配置文件,可在任何插件中加载,官方示例
1 | HOST=0.0.0.0 # 配置 NoneBot 监听的 IP/主机名 |
你可以将其复制到.env.dev中
其中
COMMAND_START=["/", ""]是对命令起始字符进行配置,当你遇到怎么让命令没有/也能被机器人识别这个问题时,请对它进行配置。这样,你的命令前就不同加/了形如custom这样的配置,你可以自定义,只要确保为JSON格式即可,且大小写不敏感,
你可以配置如:1
BAN=["123456"]
则在插件中可通过以下方式来调用(后续使用插件会讲)
1
2import nonebot
myconfig = nonebot.get_driver().config.ban
其他配置
就我个人而言,使用.env.*是最常使用的,此外还可通过系统环境变量、bot.py来配置,参见官方:[基本配置](配置 | NoneBot “基本配置”)
nonebot2机器人的使用
相信你再前面的章节中,已经对 .env.dev做出了修改,这里不再赘述
bot.py中默认生成的内容如下
1 | #!/usr/bin/env python3 |
阅读注释后(看不懂请使用翻译)我们大可去掉其中的注释,改为:
1 | #!/usr/bin/env python3 |
这里的 nonebot.load_builtin_plugins("echo") 是加载此前选择的预置插件,我们暂时搁置,现在讲讲如何使用别人写好的插件
使用商店中的插件
(2022年1月24日16:24:05部分插件未适配最新版nb,请参考:📝 NoneBot2 商店插件兼容性报告 )
在nb的商店中,有很多插件,比如这个黑丝插件
安装方法一
点击复制安装命令,你的剪贴板会复制这段命令:
1
nb plugin install nonebot_plugin_heisi
这段命令你需要在
robot文件夹下,打开终端执行,他会安装插件并将配置写进pyproject.toml中,这样你无需修改bot.py即可在nb运行的时候加载这个插件安装方法二
若你在方法一中遇到了安装问题,一般情况下,你可以将上述命令视作1
pip install nonebot_plugin_heisi
在任何打开的终端中都可以执行这段命令,而值得注意的是:
如果你使用了方法二,你需要在bot.py中的nonebot.load_from_toml("pyproject.toml")前添加一句:1
nonebot.load_plugin("nonebot_plugin_heisi")
此时你的
bot.py应该是:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import nonebot
from nonebot.adapters.onebot.v11 import Adapter as ONEBOT_V11Adapter
nonebot.init()
app = nonebot.get_asgi()
driver = nonebot.get_driver()
driver.register_adapter(ONEBOT_V11Adapter)
nonebot.load_builtin_plugins("echo")
nonebot.load_plugin("nonebot_plugin_heisi")
nonebot.load_from_toml("pyproject.toml")
if __name__ == "__main__":
nonebot.logger.warning("Always use `nb run` to start the bot instead of manually running!")
nonebot.run(app="__mp_main__:app")即加载 “nonebot_plugin_heisi” 这一插件
注意:这是方法二才需要的,一般情况下你不用这样做
tips: 多数情况下,在插件右上角的图标中进入他的仓库页面,你可以找到插件的详细用法
完成安装后,重启nb,你会看到

表示 “nonebot_plugin_heisi” 插件已经成功导入,在插件的仓库页面我们可以看到它的用法:

故我们在.env.dev中做出配置,再重启nb,在群内发送.黑丝即可
编写插件
须知
我们回顾一下我们的目录结构
1 | bot |
gocq在之前的操作中已经完成了他的使命,不再讨论。
robot下的src文件夹是你你再进行 nb create 的操作时自动生成的,若没有 src 文件夹,那必定会有一个 与项目名相同的文件夹,按照我的教程来说,在 robot下还有一个 robot文件夹。
继续拿 src 文件夹来说,在它下面有一个 plugins 文件夹,是插件目录,文件夹里的插件会在 nb启动时被加载。
这是在nb create 时配置好的,你可以在 pyproject.toml 看到:
1 | [nonebot.plugins] |
表示这个nb项目的插件目录是 src/plugins
接下来我将演示一个简单的插件编写,仅提供入门nb的一个思路,其他操作将写在后面,或另撰新文。
开始
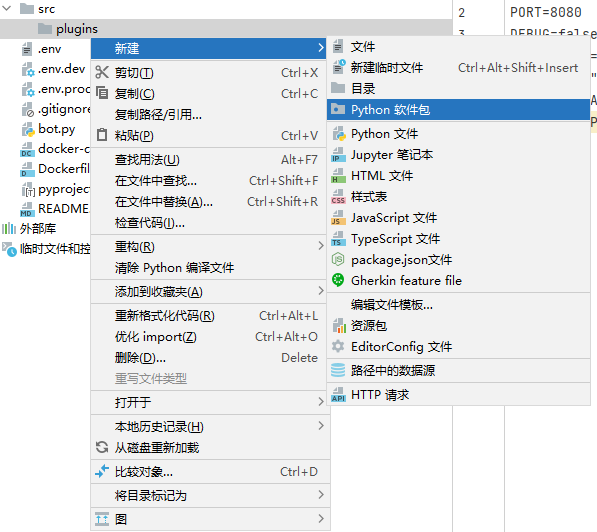
官方推荐使用python包文件形式创建插件,即 :一个插件为一个文件夹,文件夹名即插件名,下含 __init__.py的文件以及其他文件,为一个合法的python包。我们创建一个名为 first_plugin 的插件,欲用它来调用一个每日早报的接口:
1 | src |
以pycharm为例,在创建插件时,可选择新建下的 python包,该操作会自动生成 __init__.py:
编写
> askjson.py
我们先对askjson.py 进行编写(其实这种简单地操作没必要独立出来一个askjson文件,这里只是示例)
1 | import httpx |
上述代码中使用了异步的httpx而不是requests:数据获取应尽量使用异步处理。我们访问 https://api.iyk0.com/60s这个接口,该接口会返回:
1 | { |
故我们在调用 get_url()时,会返回早报的图片链接(接口正常的情况下)
> __init__.py
在该文件中编写各类事件响应及处理逻辑。
我通常默认阅读本文的宁具有一定python基础,故某些点不做解释
通常,最常见的开始姿势如下:
1 | import nonebot |
- 第2行导入的
on_command注册一个消息类型的命令处理器,也就是说,让机器人识别你的命令需要用到他。logger是nb 日志记录器对象。详见: NoneBot.log 模块
第7行中的写法中:
60s表示命令名aliases表示命令别名,即60s、早报、六十都会响应这个事件(60s哈哈哈、早报xxx这类消息也会响应,若要只有60s三个字才响应,则可以使用on_regex正则,或者进入事件后再判断)priority表示优先级,数值越小越优先
第8行,紧接着
@sixty.handle()sixty被事件响应器的装饰器装饰从而成为事件响应器的事件处理函数,handle()是简单的为事件响应器添加一个事件处理函数,这个函数将会在上一个处理函数正常返回执行完毕后立即执行。
事件处理函数中,除bot外都是可选的
b1中,按需传入参数,bot也可以不传,反正这里可以这样写,读者日后慢慢会理解
第10行调用我们编写的函数获取到链接,12行中
send()函数根据event向触发事件的主体发送消息。点我查看参数我们在注册事件时传入了Event故这里可以直接
sixty.send(message=xxx),我们也可以:bot.send(event=event,message=xxx)其中
message参数是我们要发送的消息,可以是纯文本message="你好",这里使用的MessageSegment是nb对cq协议的适配,可用于发送CQ码等(个人理解),即:1
await sixty.send(message=MessageSegment.image(img_url))
等价于(不推荐)
1
2
3
4
5
6
7rely=[{
"type": "image",
"data": {
"file": img_url
}
}]
await sixty.send(message=rely)如果你要发送文本+图片,如下写法皆可:
1
await sixty.send(message="今日早报"+MessageSegment.image(img_url))
1
2
3
4
5
6
7
8
9
10
11
12
13rely=[{
"type": "text",
"data": {
"text": "今日早报"
}
},
{
"type": "image",
"data": {
"file": img_url
}
}]
await sixty.send(message=rely)
现在,运行nb,向它发送
早报看会发生什么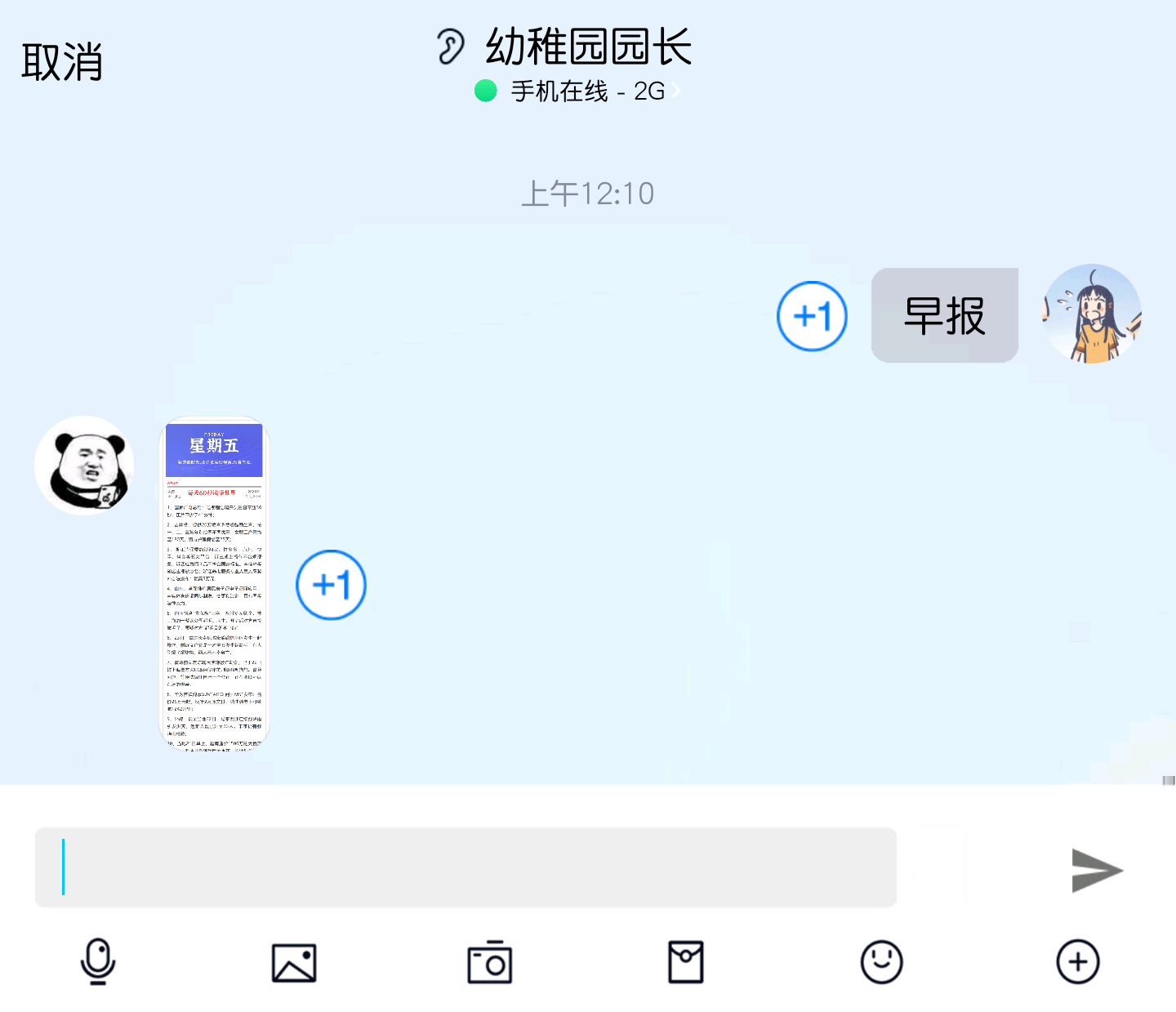
成了,此时你将在nb日志界面看到

其中包含了:
消息id
-765866496,消息来源
1796031384消息内容
早报事件被那个插件的Matcher处理了
在gocq的日志界面看到

一般情况下,使用小号来登录gocq作为机器人,在发送群聊消息时,可能会出现:
这种情况我们称之为 `喜报`
若要解决这个问题,我的建议是:看脸。 你可以使用此账号挂在cq一段时间,挂的时间真得看脸,我的号就风控过一次,几分钟就好了;或者重启cq试试。 还有一种情况是:
显而易见,你的账号被冻结了,我相信,屏幕前的您能收购鹅厂,您肯定不会让上述情况发生的,对吧(确信)

tips:发送本地图片:
利用gocq+nb作为机器人发送本地图片时,若使用相对路径,要记得 路径是相对gocq的 而不是相对nb项目的,
1
await sixty.send(message=MessageSegment.image("file:///路径"))
1
2
3
4
5
6
7rely=[{
"type": "image",
"data": {
"file": "file:///路径"
}
}]
await sixty.send(message=rely)
路径问题本人一般使用Path:
1 | from pathlib import Path |
上述img_path都是Path对象,需要使用时可str(img_path), 此为个人见解,若有错误,烦请在评论区指出
此外:python路径操作新标准:pathlib 模块 - 和牛 - 博客园 (cnblogs.com)
其他
官方配置文档 :配置 | NoneBot 。这里暂时用不到,有需要请阅读之。